


为什么说AR可视化让机械臂实验更高效?
近年来,企业和品牌利用AR的3D可视化功能来远程辅助维修、指导用户对产品自检的案例越来越多。AR的好处是可以为用户带来额外信息,比如将3D虚拟指示固定在物理空间中,或是叠加在需要操作的设备上,帮助用户直观、准确的了解操作步骤。利用AR可视化指导方案,甚至可以帮助新员工快速了解工作流程。
那么,如果将AR用于实验室中,是不是也可以帮助实验人员更直观的查看实验步骤,从而提升实验的准确性和效率呢?
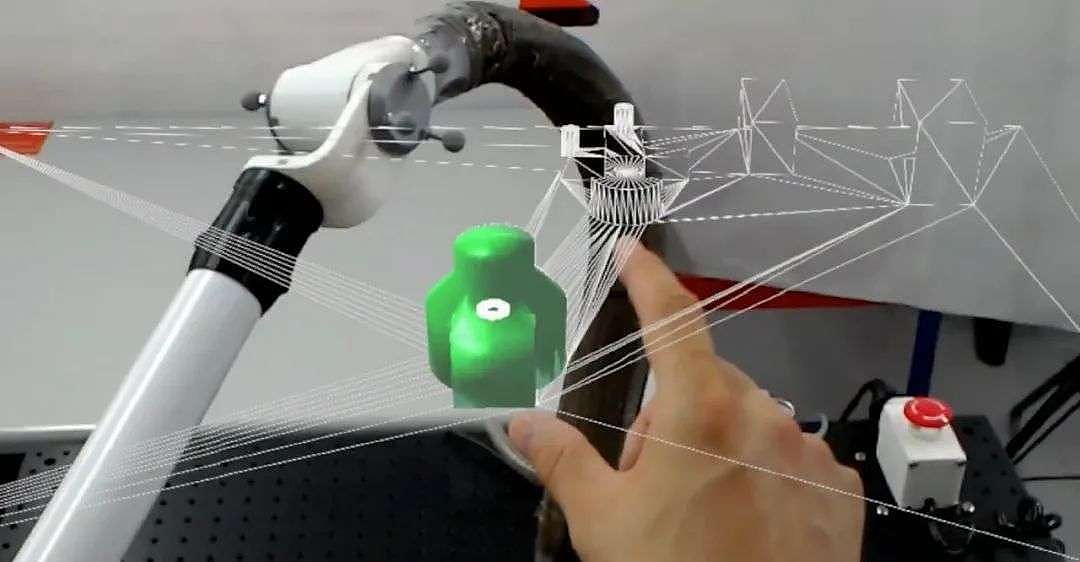
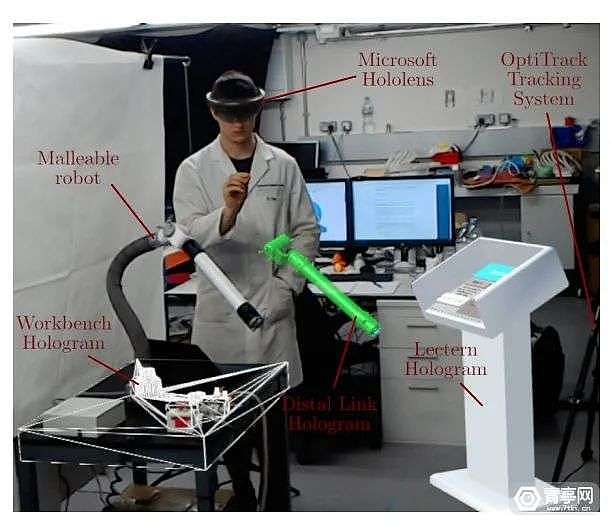
近期,英国帝国理工大学REDS实验室就进行了这样一种尝试,将AR可视化用来规范柔性机械臂的手动设置流程。整个实验的流程是,戴上HoloLens的实验员用手势操作,将虚拟的AR机械臂移动到设定好的位置上,然后再用手将真的机械臂移动到AR的位置,按照虚拟机械臂的形状去摆放。

如此一来,实验员可以更准确、直观的设置柔性机械臂,这与参考2D图片相比,效率更高,而且误差也更小。据了解,利用AR来对齐机械臂的平均误差约为10.54±4.32毫米,比没有AR辅助的手动对齐误差更低(高达19.62毫米),说明AR可视化明显降低了手动调试的误差。
柔性机械臂实验痛点
在工业领域,机械臂常用于自动化作业等场景,比如进行自动装配、喷气、搬运、焊接等工作。与工业领域常见的关节机器人/多轴机械臂相比,柔性机械臂的优势在于扭转方向和程度更灵活,不受关节旋转角度限制,可弯曲成各种形状。而且易于定制,适用于制造、航天器维护、损伤复健等场景。
不过,柔性机械臂运动方式更加复杂,其运动轨迹是非线性的,因此需要建立动力学模型来动态控制。此外,柔性机械臂可辅助关节机器人,作为灵活的第三只手臂来进行分担工作量。
与硬性的关节机械臂相比,柔性机械臂更难操作,尤其是用手动来塑形可能会产生误差。通常,培训柔性机械臂的时候需要先手动将它塑造成任务所需的形状,而在没有指导的情况下,实验员很难将机器人配置成准确的形状。

科研人员表示:多自由度机器人在设计、轨迹规划和方向控制等方面都存在难度,而这也是许多围绕机器人设计的实验中普遍面临的问题。随着机器人和计算技术不断发展,操控机械臂的准确性和可重复性越来越高,不过在一些任务中,需要由人来手动操作机械臂,而这可能会影响任务的准确性。
这是因为,计算机的意图很难与人工操作者同步(因为人脑需要将2D配置图转化成3D场景,这个过程和手动操作的过程可能会存在误差),这时候AR可视化成为一种有效的解决方案。
AR可视化解决问题
因此,REDS实验室的科研人员研发了一个AR可视化系统,通过直观的AR指示,来辅助机械臂培训。实验中采用的机械臂由柔性和硬性部分组成,其中柔性部分内含聚脂薄膜层,具有一定程度的可塑性,在弯曲后可以固定位置。

据了解,REDS实验室研发团队分别来自于计算机系和戴森设计工程学院的学生,戴森设计工程学院是戴森公司投资冠名的学院,戴森在在2014年投资帝国理工500万英镑,建立机器人实验室。
该研究论文高级作者Nicolas Rojas博士表示:手动调整机械臂的一大难点是位置移动的准确性,仅依靠目测效果不好,因此需要用AR可视化来辅助。
简单来讲,AR在这场科研实验中的作用是,辅助实验员手动塑型/调整机械臂,将机械臂训练变得更直观、标准化。细节方面,HoloLens通过摄像头来定位AR,而使用者则可以看到叠加在真实场景中的AR指示,也可以用手调整AR的位置。通过将机械臂与AR可视化模板重叠,你可以将它锁定到正确的方位。
实际上,用AR提供可视化指导的关键是将空间信息和虚拟标记结合,显示准确的3D空间关系,从而提升AR指导的准确性。在此前Rosen等人进行的一项实验中就发现,利用AR头显来标记撞击的准确率高达75%,而利用移动2D AR来标记的准确性为65%,说明立体AR指导的准确性更好,可提供更直观的空间定位效果。
实验结果
接下来,为了验证AR指导方案的效果,科研人员在5名男性中进行实验,这5个人的年龄在20到26岁之间,他们拥有机器人技术知识,不过缺少专门操作柔性机器人的经验。结果发现,参与实验的5个人均可准确调试机器人。

经过证明,科研人员发现AR可简化柔性机械臂实验的过程,实验人员不需要很多技术经验也能操作。而在后续的体验调查中,大多数参与者对AR可视化方案比非AR方案更感到满意。
不过,利用AR指导操作依然存在误差,其原因可归结为以下几种:1)手势追踪误差;2)AR定位误差、缺少自动动态的对齐系统;3)3D渲染的刷新率低,快速移动头部可能会导致AR图像位移。此外,柔性机械臂不能像硬性机械臂那样维持其形状,柔性部分可能会受到硬性部分影响而偏移位置。
总结
总体来讲,这是一项探索人机交互(HRI)的实验。尽管HRI已经是一个得到充分研究的领域,但大多数科研人员认为,目前依然需要一种方式来帮助人类和机器人对空间的理解达成共识。传统基于2D显示屏的方案并不直观,使用者需要抬头对比屏幕来确认每一步操作,整个过程比较繁琐,而且可能存在误差。
相比之下,AR的可视化特性可进一步提升人机交互的效率、准确性。利用AR来指导机械臂操作的方案, 潜在的应用场景还包括制造、建筑、车辆维护、辅助病人复健等等,甚至还可以在航天器上使用。
接下来,科研人员计划将AR可视化与触觉、音频反馈结合。目前,确认机械臂配置主要通过视觉提示,而结合音频和触觉等额外的感知提示,有望进一步提升机械臂配置的准确性。
此外,也计划将AR可视化用于硬性机械臂实验中,因为硬性机械臂比柔性机械臂更容易固定,操控的准确性和精度更好。
参考:
https://spiral.imperial.ac.uk/bitstream/10044/1/94598/2/Augmented%20reality%20malleable%20robots%20%28Final%20version%29.pdf
本文来自微信公众号“青亭网”(ID:qingtinwang),编辑:Esther,36氪经授权发布。


 +61
+61 +86
+86 +886
+886 +852
+852 +853
+853 +64
+64


