


机器人也能打排球了,击球成功率80%,日本东京大学新型气动仿人机器人
本文来自微信公众号“机器人大讲堂”(ID:RoboSpeak),作者:Robospeak,36氪经授权发布。
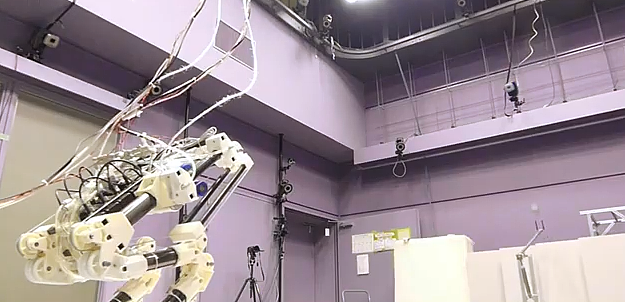
图1 Liberobot类人机器人
导读
日本东京大学的研究人员近来研发了一款名为Liberobot的仿人机器人。Liberobot拥有八个关节,这八个关节采用结构集成的气动电缆气缸进行驱动。研究人员使用学习动力学查找表(IMoLo)进行即时运动生成,以生成气动仿人机器人的运动。利用该方法,机器人Liberobot可以瞬间向前跳跃并击中空中的飞球,这类似于人类排球运动员在排球运动中的表现。实验结果表明,使用IMoLo的气动仿人机器人可以在指定时间内即时执行动态全身运动,例如跳跃和击打运动,即使是针对运动中的目标,也可以实现有效击打。该仿人机器人是第一个能够执行此类动态运动的气动仿人机器人。相关研究成果在发表在SCI期刊IEEE Robotics and Automation Letters上。
对于日本东京大学的研究人员而言,他们对执行动态运动的人形机器人很感兴趣。特别是,他们更关注仿人机器人的全身动态运动,这些运动是在指定时间内响应不断变化的目标而瞬时产生的。
例如跳跃和击打运动描述了一种协调的全身动态动作,其中人形机器人必须采取准备跳跃的姿势,接着它必须检测运动中的球,并预测其轨迹,然后产生相应的协调运动,最终在球落地前击中球。仿人机器人的执行系统必须能够加速整个身体同时跳跃和摆动手臂。

图 2仿人机器人跳跃击打动作说明
气动执行器与电动和液压执行器相比具有更高的功率重量比,而电动执行器的位置控制精度更高,而液压执行器产生的力更大。气动执行器虽然在机器人动态运动方面具有优势,但对指令的响应速度较慢,位置控制的精度较低。因此,气动仿人机器人很难通过针对变化目标的高速运动来准确地遵循其末端执行器的计划轨迹。
日本东京大学的研究人员近来研发了一款名为Liberobot的气动仿人机器人。并针对气动仿人机器人开发一种立即生成和执行跳跃和打击运动的方法。该方法使用学习动力学查找表(IMoLo)进行即时运动生成,该方法使气动仿人机器人能够即时生成运动以响应不断变化的目标。Liberobot仿人机器人是第一个能够执行此类动态运动的气动仿人机器人。
Liberobot气动仿人机器人
机器人的动作行为通常使用包含顶层和底层部分的分层系统生成。利用顶层部分和底层部分的协同行动,最终实现机器人的期望运动。

图 3 机器人动作控制分层系统
日本东京大学的研究人员在研究中,目标是让气动仿人机器人能立即开始运动:向前跳跃,摆动手臂,并将手伸到将要击中飞球的击球位置。因此开发了一种产生这种运动的方法:IMoLo。
使用IMoLo的机器人可以使用查找表(下图所示)立即生成运动,该表显示了使用机器人的手在所需时间到达目标位置的命令的时间序列。因此,机器人也可以在适当的时间开始这种运动,并在目标时间将手伸到该位置。机器人不需要遵循任何轨迹,它只需要执行命令。

图 4 IMoLo流程图
该机器人高1163mm,宽400mm,不含电源线、局域网(LAN)电缆和外部空气管的重量为7.4kg。机器人有两条腿和两条手臂。其每只手臂上安装有一块亚克力板,使其能够击球。该板尺寸为300×80mm,厚度为3mm。
该机器人有八个关节:每只手臂一个肩关节,两条腿的髋关节、膝关节和踝关节。肩关节、髋关节和膝关节的关节活动范围为0到150°,踝关节活动范围为-45到+45°。肩部与臀部、臀部与膝盖、膝盖与脚踝之间的长度分别为 446mm、290mm和310mm。脚的长度是211mm。

图 5日本东京大学Liberobot气动仿人机器人
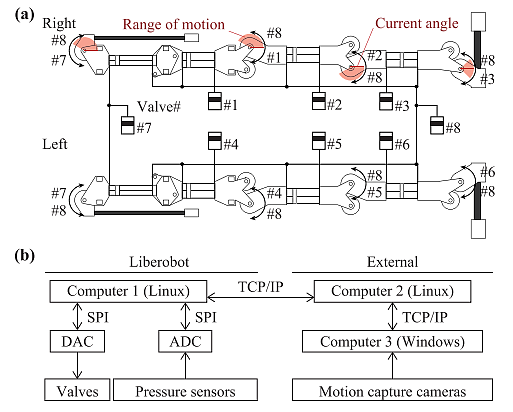
图6 机器人气动连接方式及通讯方式
实验过程中,研究人员将球从距离机器人约5米的地方扔出去,并在1秒后落到机器人面前。然后机器人会根据动作设置向前跳跃并在空中击球。研究人员利用机器从两个不同的位置向不同方向扔球20次。结果表明,机器人在20次试验中击球16次,成功率为0.8,这可以说明机器人可以成功实现跳跃击球动作。

图 7 击球实验(红圈所示为球)
图8 击球实验
图 9击球实验
总结与展望
这项研究提出了IMoLo方法,用于立即生成气动仿人机器人的动态运动,以支持跳跃和击打运动。模拟实验显示,在IMoLo中使用非线性插值的仿人机器人在跳跃和击打运动中,手到达位置的误差大大减小。气动仿人机器人Liberobot使用IMoLo执行不同的跳跃和击球动作,并以0.8的成功率击中来自不同位置的球。结果表明,气动仿人机器人可以在目标时间内响应移动物体即时产生运动,并使用IMoLo执行这些运动。Liberobot仿人机器人是第一个能够执行此类动态运动的气动仿人机器人。
然而IMoLo也有一些不足。使用IMoLo的机器人需要从相同的初始状态开始学习运动,因此,在执行学习到的运动之前,它每次都需要处于相同初始状态。在IMoLo中进行学习模型的试验可能会损坏机器人。因此,如何灵活安全的让机器人学习更多的动作则是接下来的研究重点。
参考资料
1.Tanaka K, Nishikawa S, Niiyama R, et al. Immediategeneration of jump-and-hit motions by a pneumatic humanoid robot using a lookuptable of learned dynamics[J]. IEEE Robotics and Automation Letters, 2021, 6(3):5557-5564.
2. Thandiackal, R., et al., Emergence of robustself-organized undulatory swimming based on local hydrodynamic force sensing.Science Robotics, 2021. 6(57): p. eabf6354.
3. https://mp.weixin.qq.com/s/pISXu24WZfOoSPObhmmC2w


 +61
+61 +86
+86 +886
+886 +852
+852 +853
+853 +64
+64


